
An autonomous underwater vehicle can propel itself effectively by harnessing the energy of nearby water currents. Underwater and aerial vehicles must navigate a complex environment of gusts and currents, contending with many flows while trying to maintain their course.
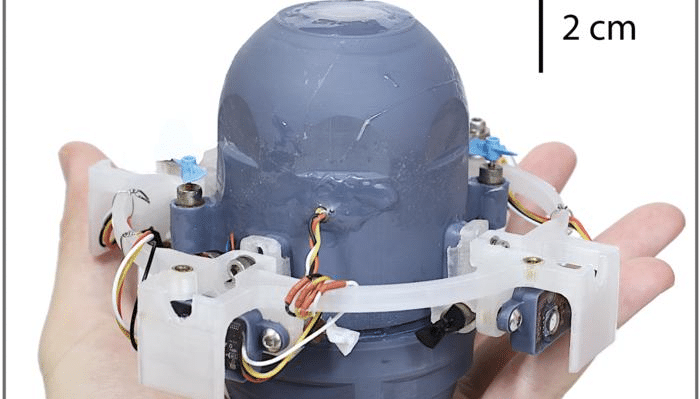
Peter Gunnarson and John O. Dabiri conceived an underwater robot that uses these flows to reduce the energy required to travel, “surfing” vortices to reach its destination. The palm-sized robot, CARL, was equipped with an onboard inertial measurement unit, ten motors to allow movement in three axes, and a simple but effective algorithm: if the magnitude of acceleration in the cross-flow direction exceeded a threshold, CARL would swim in the same direction as the acceleration.
The robot was tested in a tank 1.5 m deep and 5 m long, in which vortex rings were generated by pulsing a wall-mounted thruster. Using the algorithm, CARL was able to surf the vortex from one end of the tank to the other, using one-fifth the energy of a robot without the same programming.
According to the authors, CARL’s success in surfing a prototypical flow structure suggests that, with further development, a similar technique could be used to enable autonomous vehicles to significantly improve their efficiency through interaction with background flows.
Watch the video here.







